Erosion features
A morphological transformation T of an image (point set) A in 2-dimensional Euclidean space \(\mathbb{E}^2\) by a smaller image (point set of smaller cardinality) B can be formulated in terms of a relation of the point set A with so called structuring element B. The application of morphological transformation T(A) means that the structuring element moves systematically across the entire set A with respect to a local origin.
Define translation \(X_h\) of point set \(X\) by a vector \(h\) as
Translation of X by h
The erosion operation combines two point sets by Minkowski set subtraction [1].
that is equivalent to taking the minkowski sum of a shape and the mirror of another shape.
every point \(p\) from the image is tested, and the result of the erosion is given by those pixels \(p\) for which all possible \(p + b\) are in \(X\). Erosion can be expressed as an intersection of all translations of the image \(X\) by the vectors \(−b \in B\) :
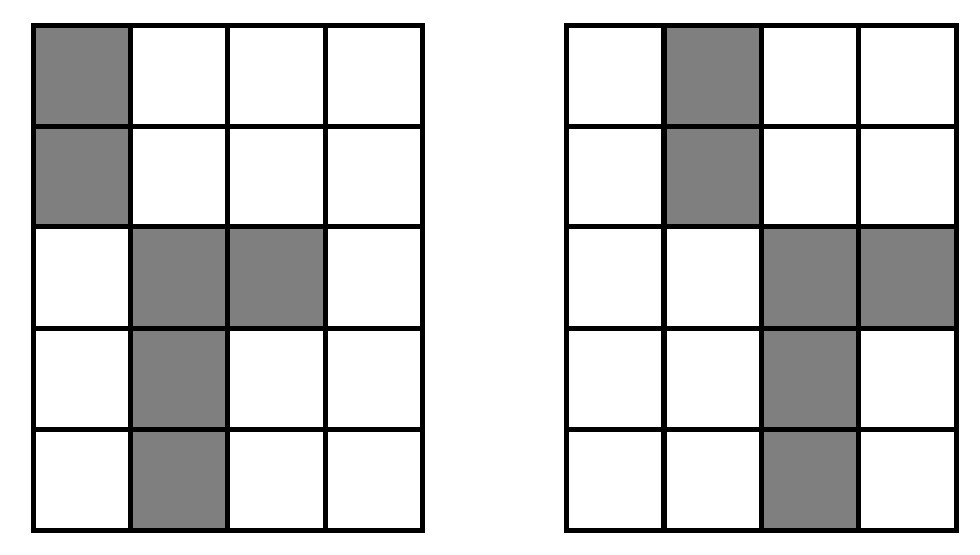
Example: given point sets
and
the result of erosion will be
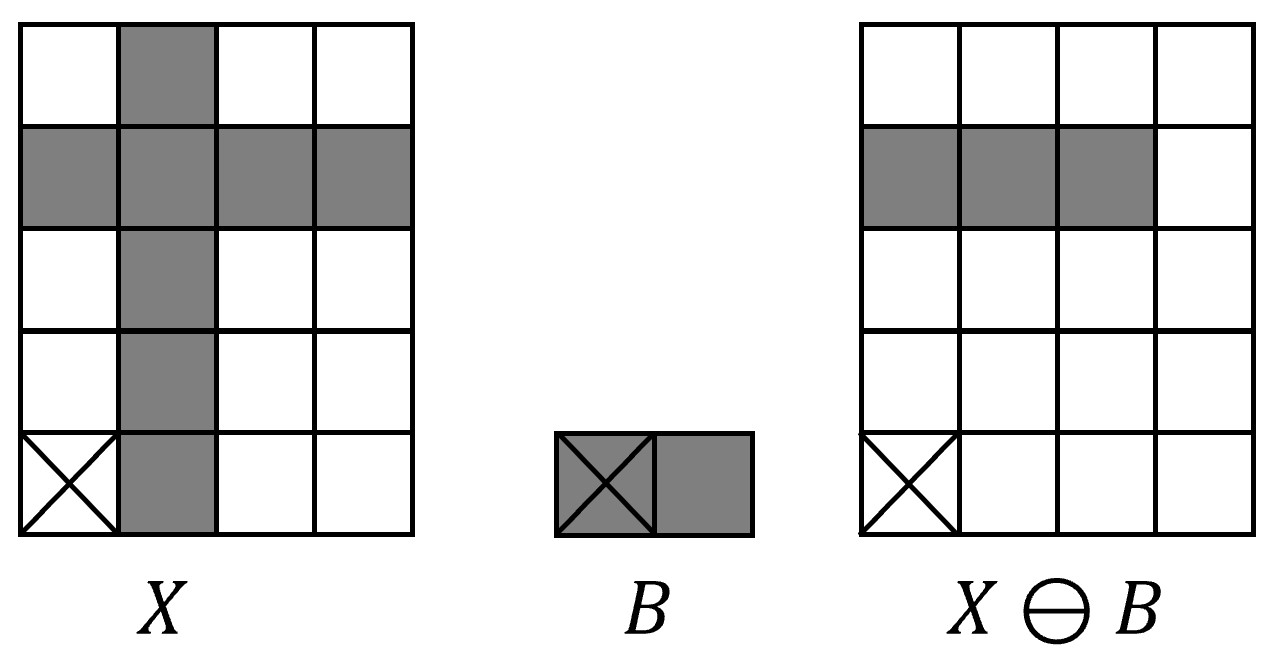
Erosion of X with structuring element B
Nyxus structuring element
By default, Nyxus uses the \(3 \times 3\) structuring element in the erosion operations.
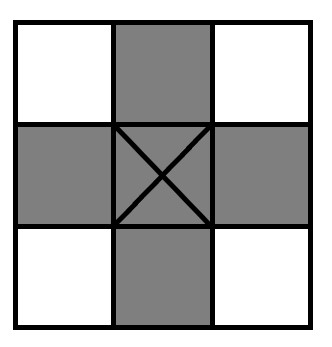
Default Nyxus structuring element
EROSIONS_2_VANISH
Feature EROSIONS_2_VANISH calculates the number of erosion operations on a ROI to vanish in its axis aligned bounding box in a sense that each pixel intensity becomes \(=0\).

Example: 5 erosion operations applied to a star-shaped ROI
EROSIONS_2_VANISH_COMPLEMENT
Unlike EROSIONS_2_VANISH which is measured with respect to a ROI’s axis aligned bounding box, this feature calculates the number of erosion operations on a ROI to vanish in its convex hull.
References
Hadwiger, H. (1957) Vorlesungen uber Inhalt, Oberflache und isoperimetrie. Springer Verlag, Berlin. http://dx.doi.org/10.1007/978-3-642-94702-5